Ongoing Research
Robust and Precise Locomotion for Legged Robots
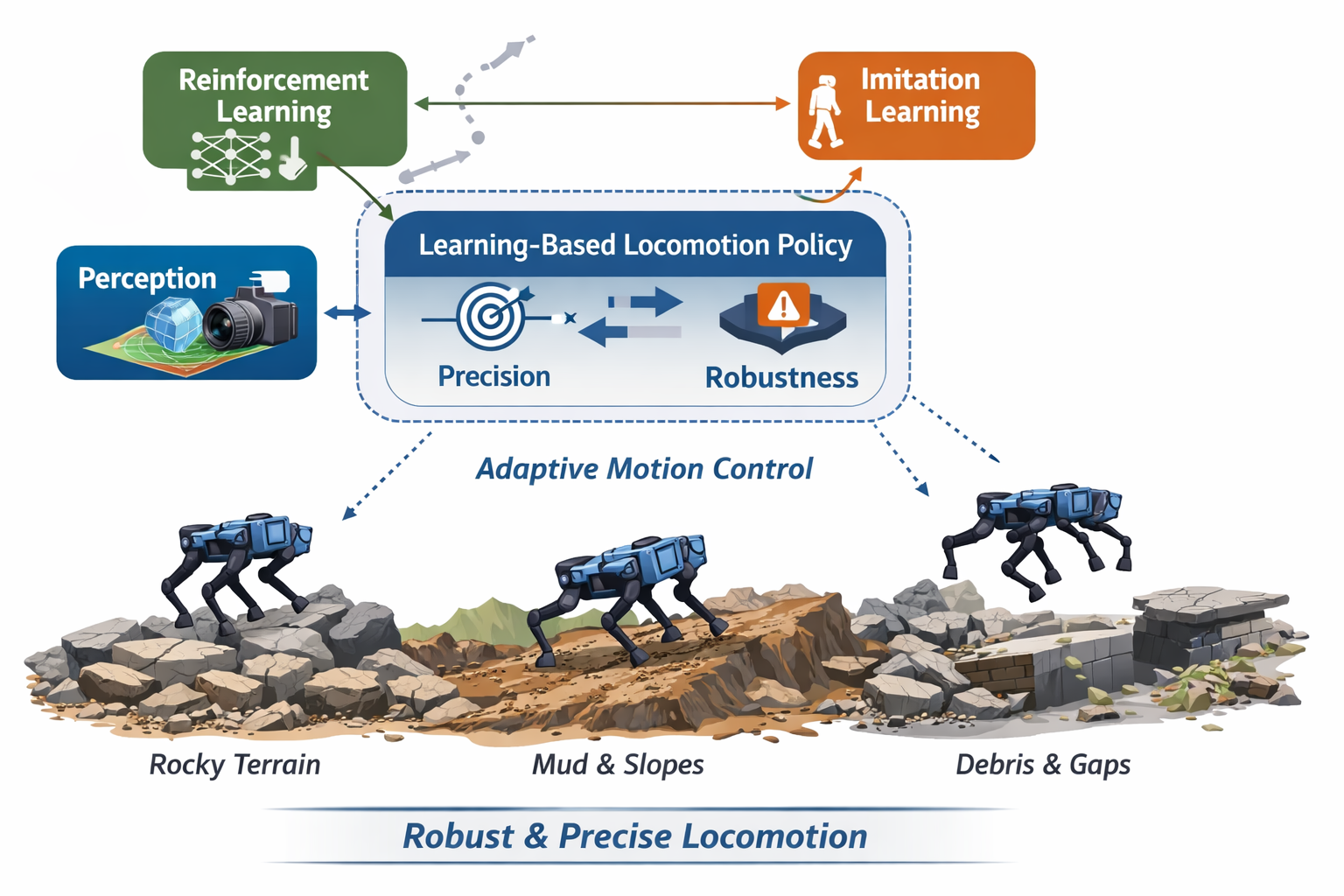
This ongoing research aims to enable robust and precise locomotion across diverse and unstructured terrains by leveraging reinforcement learning and imitation learning in conjunction with environment-aware perception. The goal is to develop learning-based locomotion policies that can adapt to terrain variations and external disturbances while maintaining accurate foot placement and stable motion execution. By combining imitation learning for structured motion priors with reinforcement learning for online adaptation, we seek to improve tracking accuracy, contact reliability, and robustness under significant environmental uncertainty. Ultimately, this research is expected to advance the deployment of legged robots in real-world environments requiring both precision and resilience.
Transibility-aware Perception and Navigation
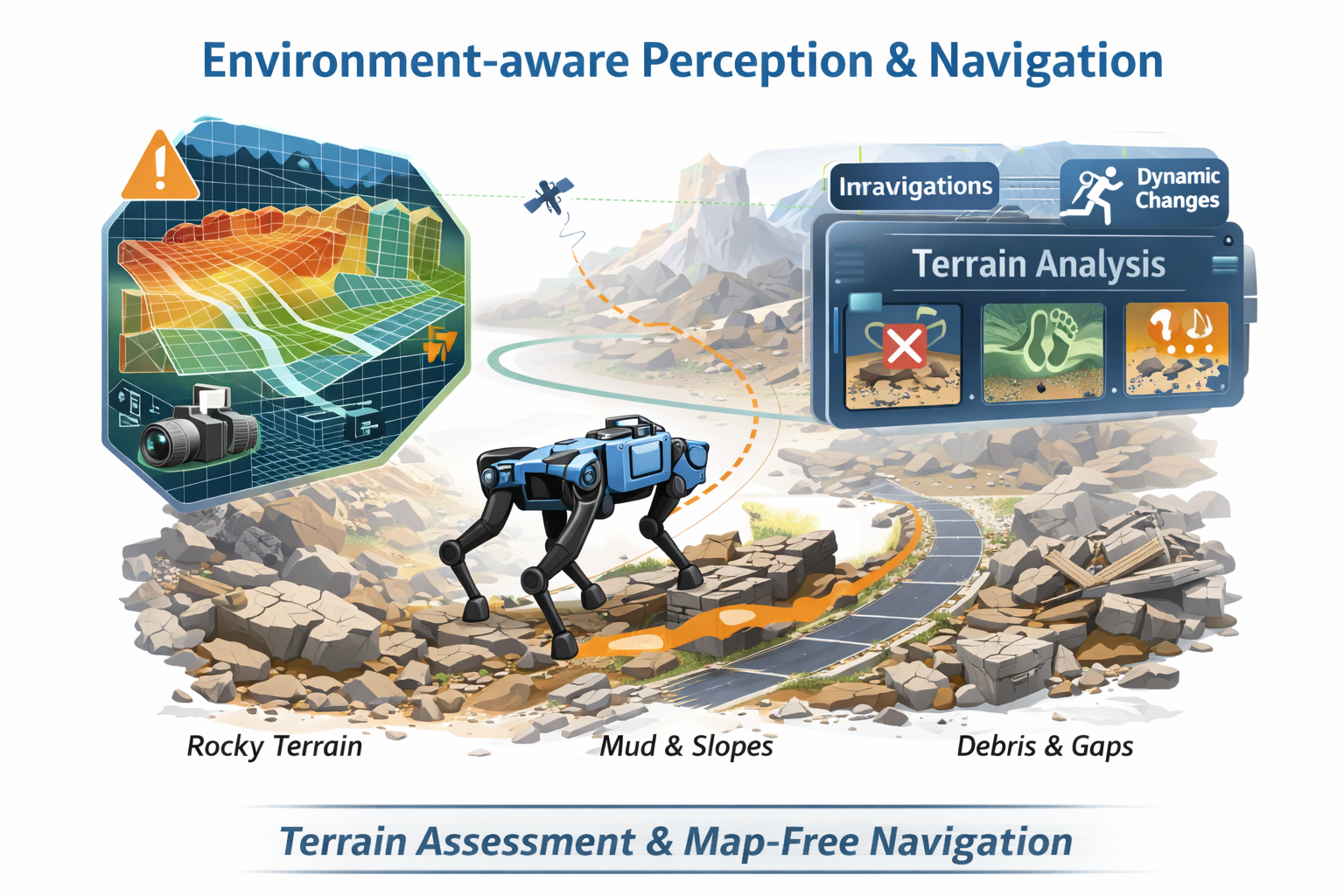
This research focuses on developing transibility-aware perception and navigation methods tailored for legged robotic systems, enabling autonomous navigation in dynamic and extreme terrains. By leveraging onboard sensing and real-time environment assessment, the robot can reason about terrain geometry, traversability, and environmental changes without relying on pre-built maps. The goal is to achieve map-free navigation that allows legged robots to adapt their motion and navigation strategies in highly unstructured, cluttered, or rapidly changing environments, supporting long-horizon autonomy and robust operation in real-world scenarios.
Dexterous and Whole-Body Coordinated Loco-Manipulation
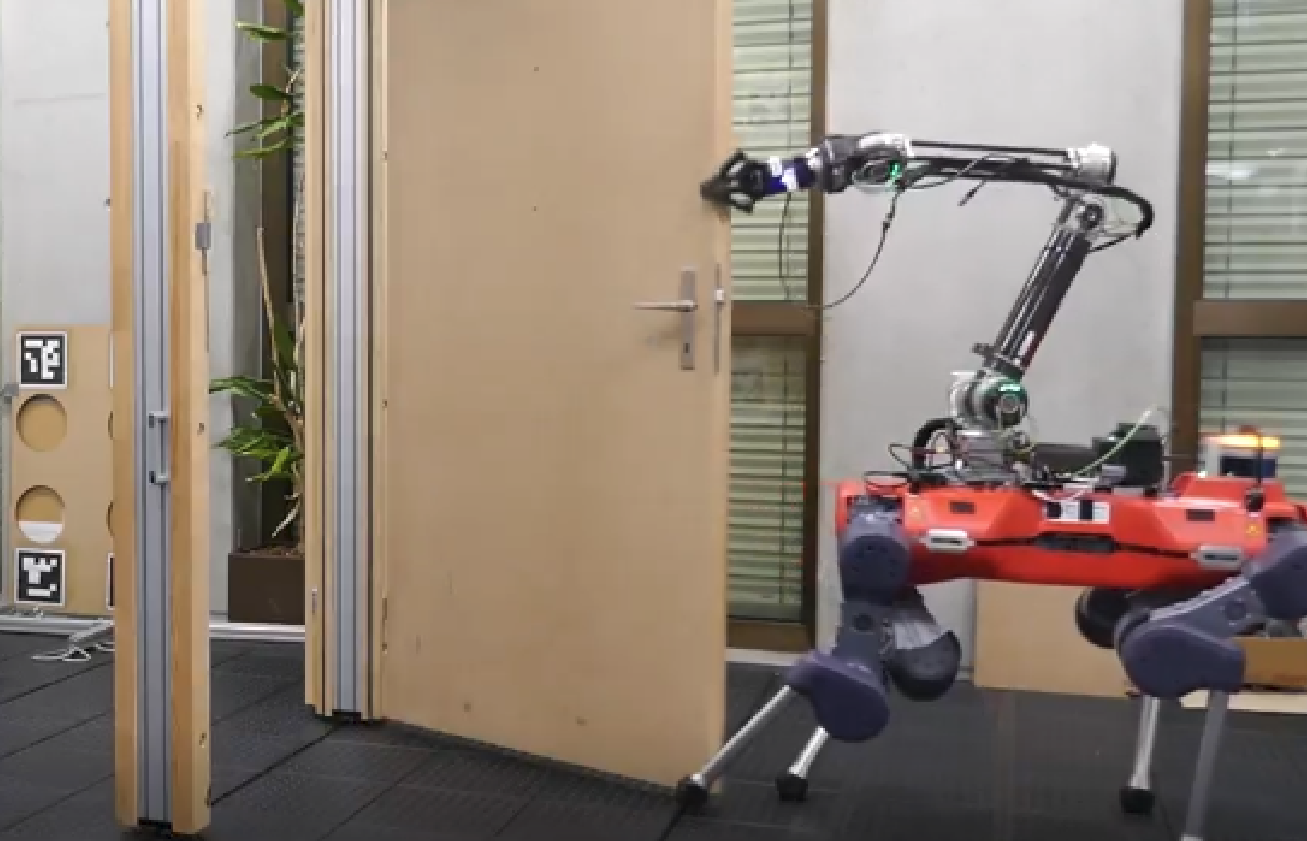
This research explores dexterous loco-manipulation using quadruped robots equipped with manipulators, treating the full robot as a coordinated multi-limb system analogous to a dexterous hand. By exploiting contacts from legs, arms, and the robot body, the system can perform complex manipulation tasks that require simultaneous mobility, force regulation, and contact switching. The goal is to enable adaptive whole-body behaviors through coordinated motion and force control across multiple contact points, allowing legged manipulators to robustly interact with the environment in contact-rich and unstructured scenarios.
Safe Actuator and Mechanical System Design
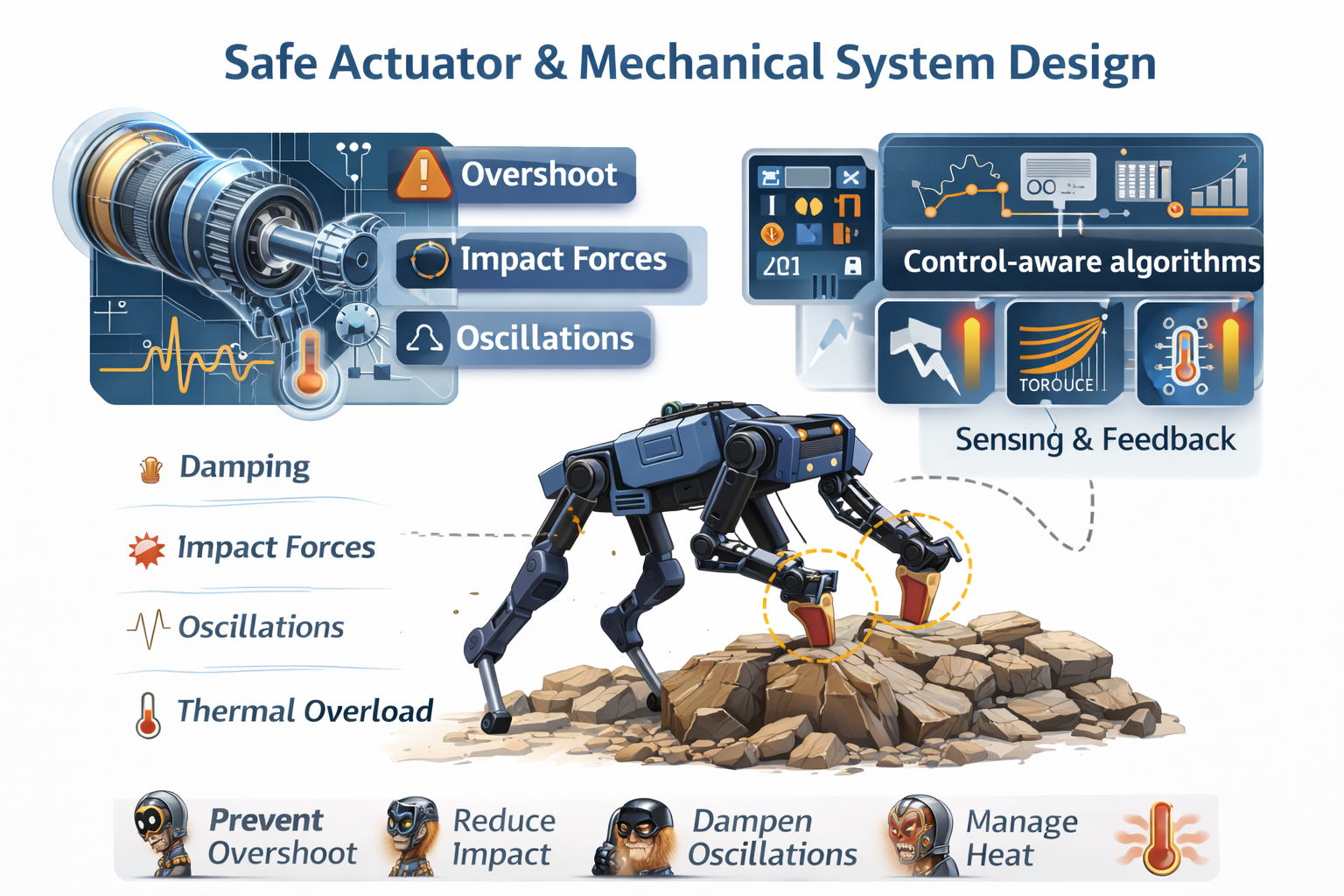
This research focuses on safety-oriented actuator and mechanical system design for legged robots, aiming to ensure reliable operation under highly dynamic and contact-rich conditions. The goal is to mitigate risks associated with overshoot, impact forces, vibrations, oscillations, and thermal overload in electric actuators and mechanical transmissions. By jointly considering actuation, mechanical compliance, sensing, and control-aware design, this work seeks to improve interaction safety, durability, and robustness of legged robotic systems, enabling stable and safe deployment in real-world environments.
Completed Research
Quadruped Jumping Motion Planning and Control
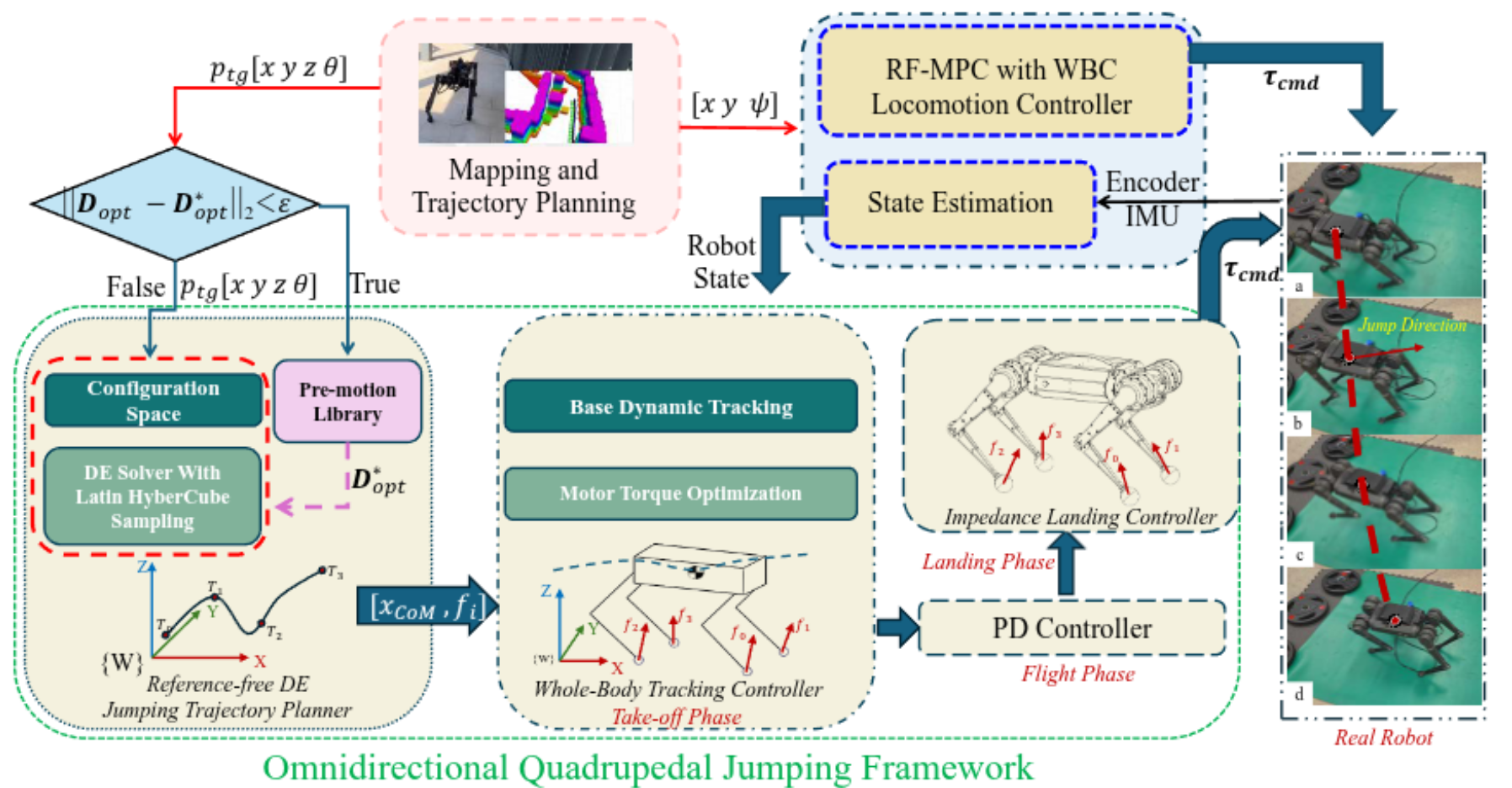
Jumping enables quadruped robots to overcome obstacles and operate in complex, unstructured environments. This research develops a motion planning and control framework for quadruped jumping that ensures agility, stability, and robustness under kinodynamic and contact constraints. Jumping motions are formulated as constrained optimization problems, integrating offline trajectory optimization with online tracking and model predictive control to handle disturbances and uncertainties. Simulation and hardware experiments demonstrate reliable execution of agile jumping behaviors, supporting real-world deployment.
Differential Parallel Leg Mechanism for Quadruped Robots
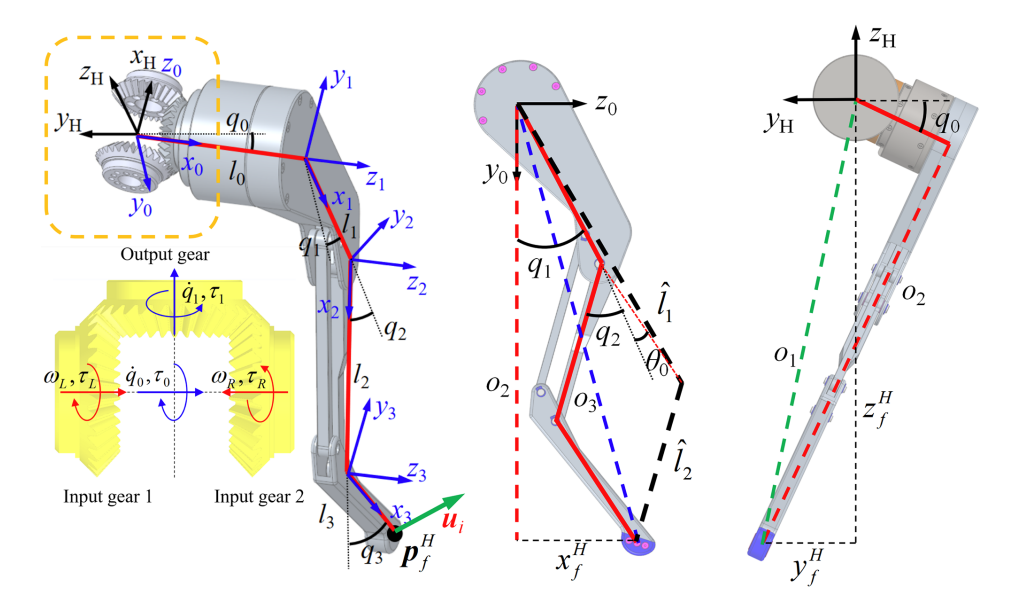
This research investigates a novel differential parallel leg mechanism for quadruped robots, aiming to achieve high force output with improved energy efficiency. By coupling multiple actuators through a differential parallel architecture, the design enables load sharing and effective utilization of passive elastic elements, reducing peak motor torque and overall energy consumption. Simulation studies and prototype evaluations demonstrate enhanced force capability and energy-efficient performance during dynamic locomotion tasks.