Robust Model Predictive Control for Quadruped Locomotion Under Model Uncertainties and External Disturbances
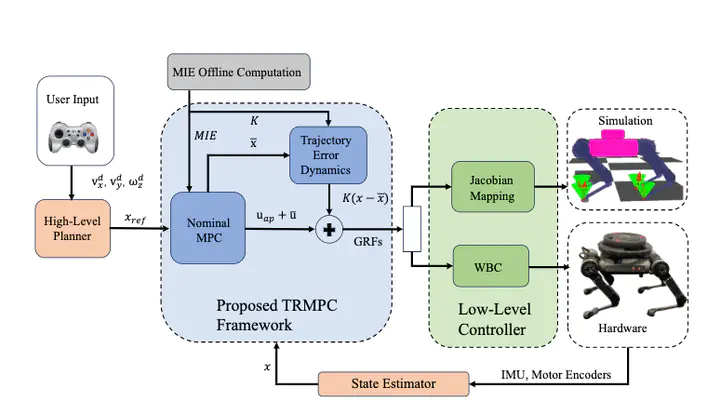 Image credit: Linzhu
Image credit: Linzhu
Abstract
Model Predictive Control (MPC) enables agile and robust locomotion in quadruped robots but is sensitive to model uncertainties and environmental variations. This paper presents a Tube-based Robust MPC (TR-MPC) framework for quadruped locomotion under uncertainties, modeled as parameter mismatches and additive disturbances. TR-MPC constructs an Invariant Ellipsoid to bound errors induced by uncertainties, ensuring convergent error trajectories. A Semi-Definite Programming (SDP) problem with Linear Matrix Inequality (LMI) constraints is solved offline to minimize the ellipsoid size, while a linear feedback term stabilizes error dynamics, guaranteeing stability within uncertainty bounds. Simulations and experiments demonstrate TR-MPC’s robustness, the robot achieves stable trotting under a 14 kg load (123% of its weight) and recovers from a 1.4 m/s impact while carrying 10 kg (88% of its weight). This framework significantly enhances robustness in dynamic and uncertain environments.