Evolutionary-Based Online Motion Planning Framework for Quadruped Robot Jumping
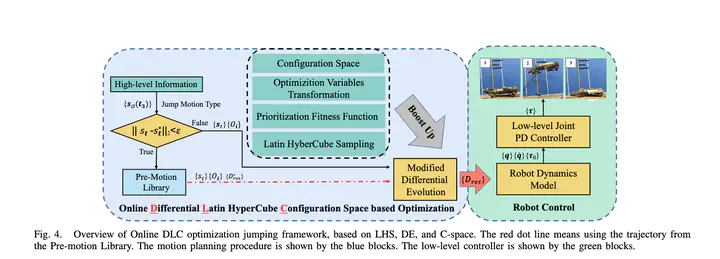 Image credit: Linzhu
Image credit: Linzhu
Abstract
Offline evolutionary-based methodologies have supplied a successful motion planning framework for the quadrupedal jump. However, the time-consuming computation caused by massive population evolution in offline evolutionary-based jumping framework significantly limits the popularity in the quadrupedal field. This paper presents a time-friendly online motion planning framework based on meta-heuristic Differential evolution (DE), Latin hypercube sampling, and Configuration space (DLC). The DLC framework establishes a multidimensional optimization problem leveraging centroidal dynamics to determine the ideal trajectory of the center of mass (CoM) and ground reaction forces (GRFs). The configuration space is introduced to the evolutionary optimization in order to condense the searching region. Latin hypercube sampling offers more uniform initial populations of DE under limited sampling points, accelerating away from a local minimum. This research also constructs a collection of pre-motion trajectories as a warm start when the objective state is in the neighborhood of the pre-motion state to drastically reduce the solving time. The proposed methodology is successfully validated via real robot experiments for online jumping trajectory optimization with different jumping motions (e.g., ordinary jumping, flipping, and spinning).