CUHK Legged Robot Lab (CUHKLRL)
CUHK Legged Robot Lab (CUHKLRL)
Home
People
Publications
Posts
Talks
Projects
Join Us
Light
Dark
Automatic
1
Robust Model Predictive Control for Quadruped Locomotion Under Model Uncertainties and External Disturbances
Robust MPC for quadrupedal robot
Weipeng Xia
,
Linzhu yue
,
Yun-Hui Liu
Video
A Fast Online Omnidirectional Quadrupedal Jumping Framework Via Virtual-Model Control and Minimum Jerk Trajectory Generation
Rapid Jumping framework for quadrupedal
Linzhu yue
,
Lingwei Zhang
,
Zhitao Song
,
Hongbo Zhang
,
Jinghu Dong
,
Xuanqi Zeng
,
Yunhui Liu
PDF
Cite
Video
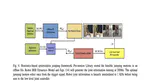
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Xuanqi Zeng
,
Hongbo Zhang
,
Linzhu yue
,
Zhitao Song
,
Lingwei Zhang
,
Yunhui Liu
Cite
Evolutionary-Based Online Motion Planning Framework for Quadruped Robot Jumping
Evolutionary-Based Online Motion Planning jumping framework
Linzhu yue
,
Zhitao Song
,
Hongbo Zhang
,
Xuanqi Zeng
,
Lingwei Zhang
,
Yunhui Liu
Cite
GenLoco: Generalized Locomotion Controllers for Quadrupedal Robots
A framework for training generalized locomotion (GenLoco) controllers for quadrupedal robots.
Gilbert Feng
,
Hongbo Zhang
,
Zhongyu Li
,
Xue Bin Peng
,
Bhuvan Basireddy
,
Linzhu yue
,
Zhitao Song
,
Lizhi Yang
,
Yunhui Liu
,
Koushil Sreenath
,
Sergey Levine
PDF
Cite
Code
Video
An Optimal Motion Planning Framework for Quadruped Jumping
Heuristic-based offline jumping framework
Zhitao Song
,
Linzhu yue
,
Guangli Sun
,
Hongsuo Wei
,
Yihu Ling
,
Linhai Gui
,
Yunhui Liu
PDF
Cite
Video
Cite
×