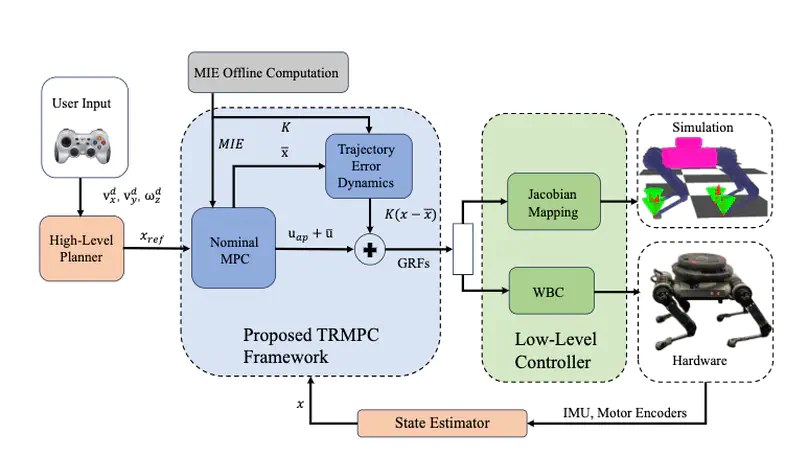
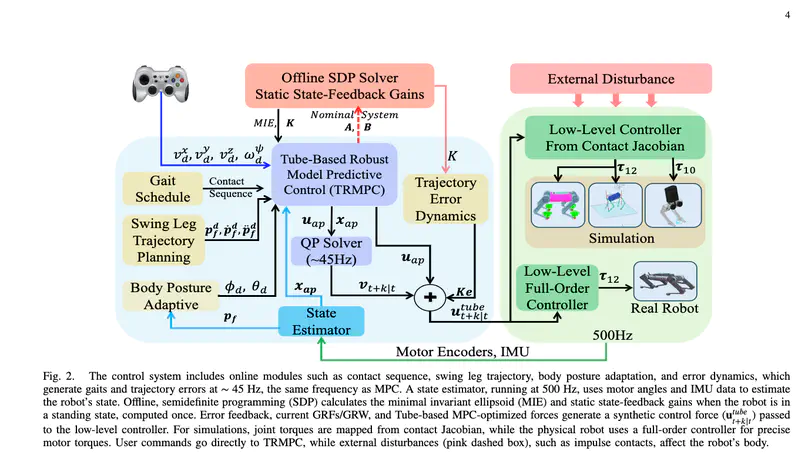
Robust MPC for quadrupedal robot
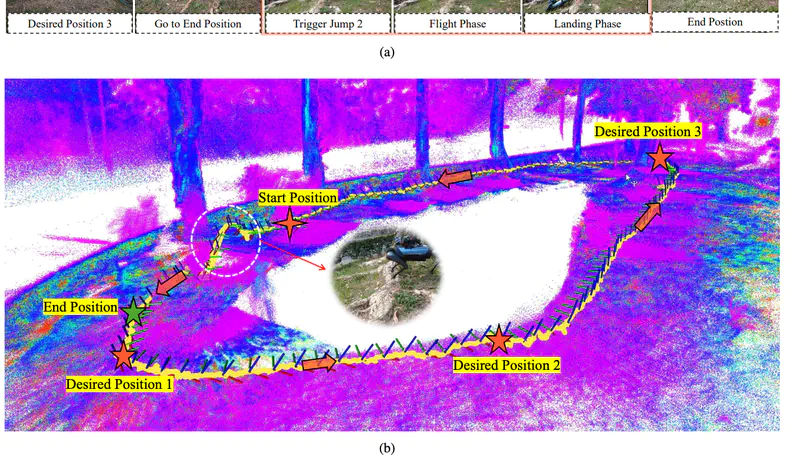
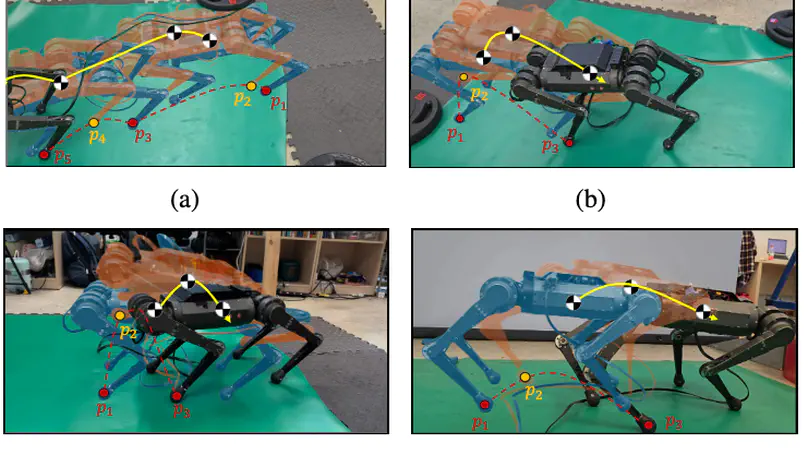
Online Omnidirectional Jumping Trajectory Planning
Robust MPC for biepdal and quadrupedal robot
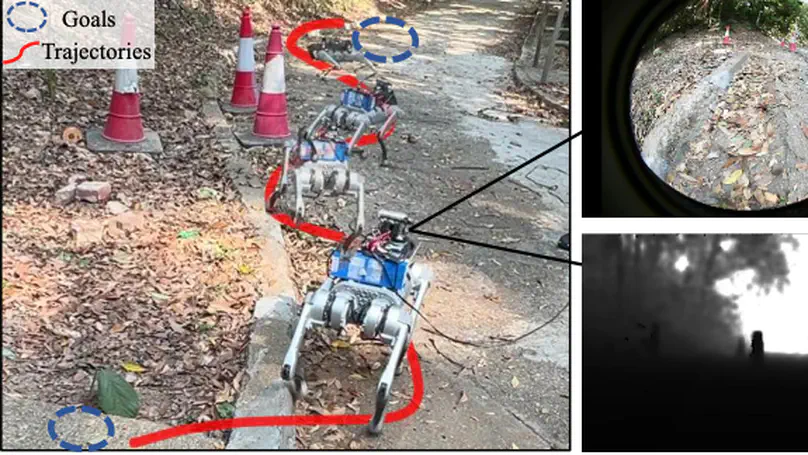
Traversability-Aware Legged Navigation by Learning
Rapid Jumping framework for quadrupedal
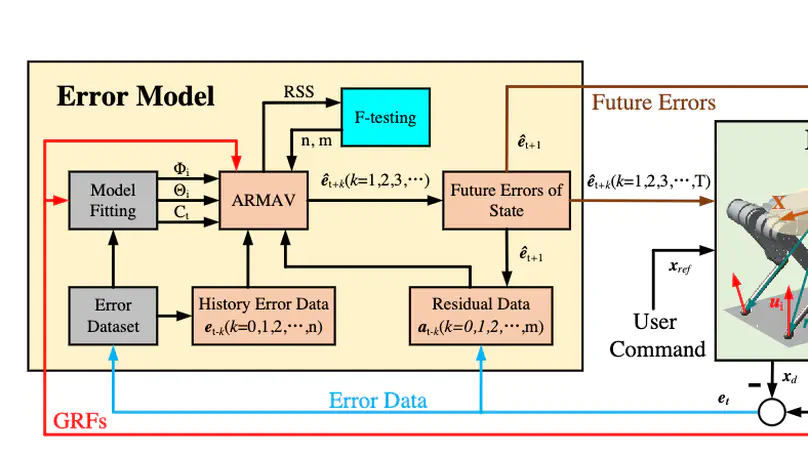
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
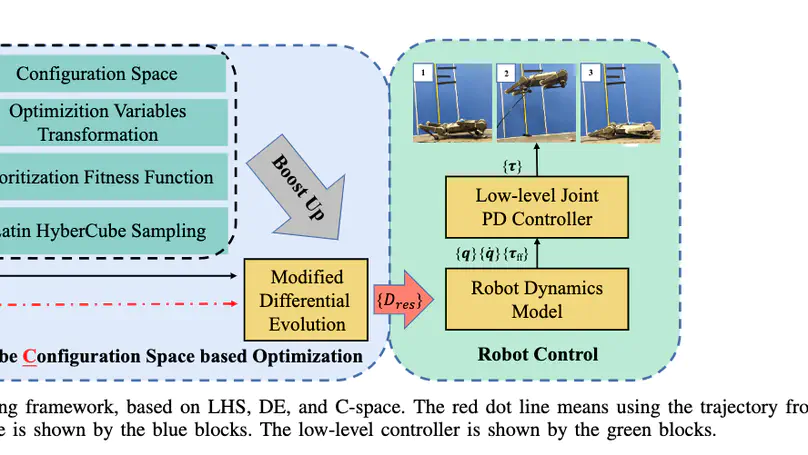
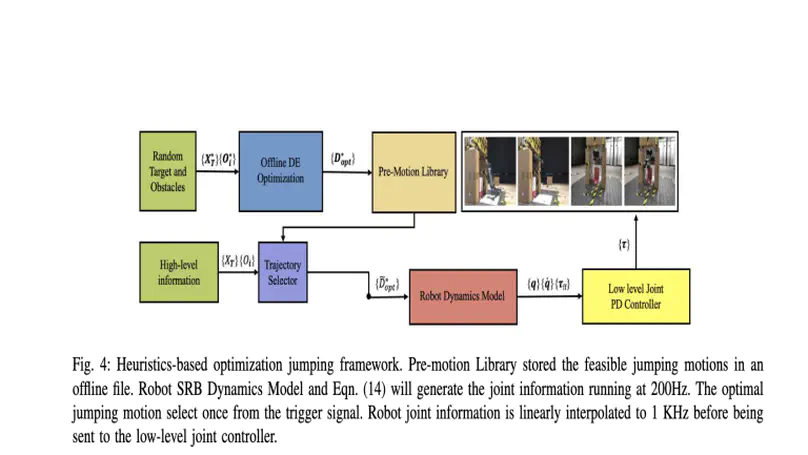
Evolutionary-Based Online Motion Planning jumping framework
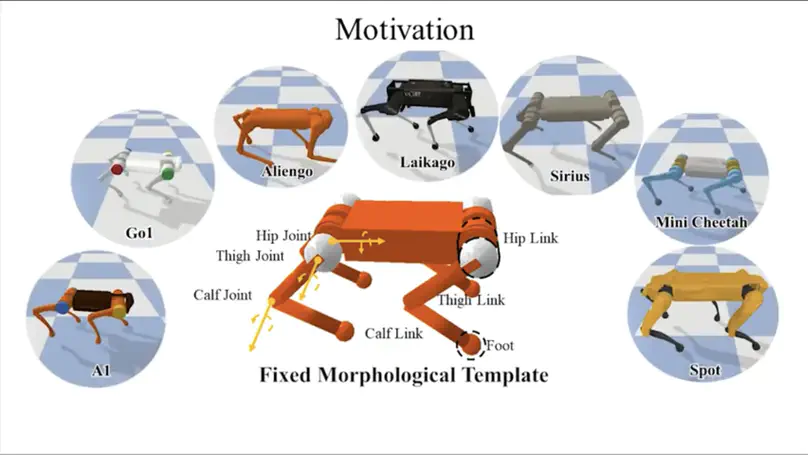
A framework for training generalized locomotion (GenLoco) controllers for quadrupedal robots.
Heuristic-based offline jumping framework
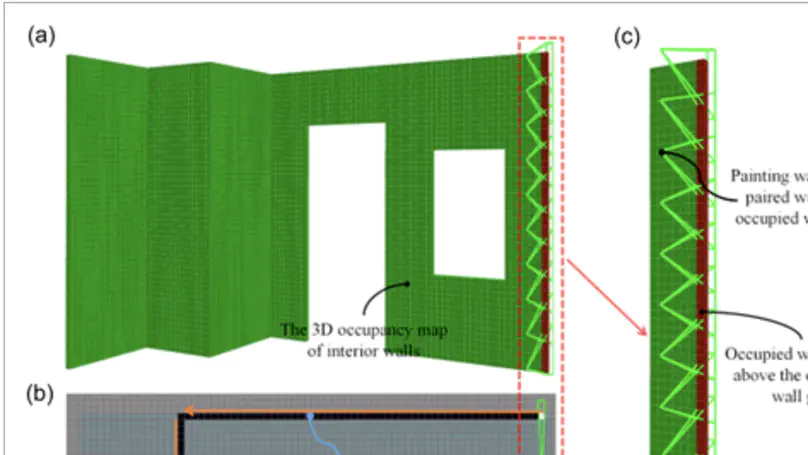
Painting Robot