An energy-efficiency design optimization framework for legged robots
Abstract
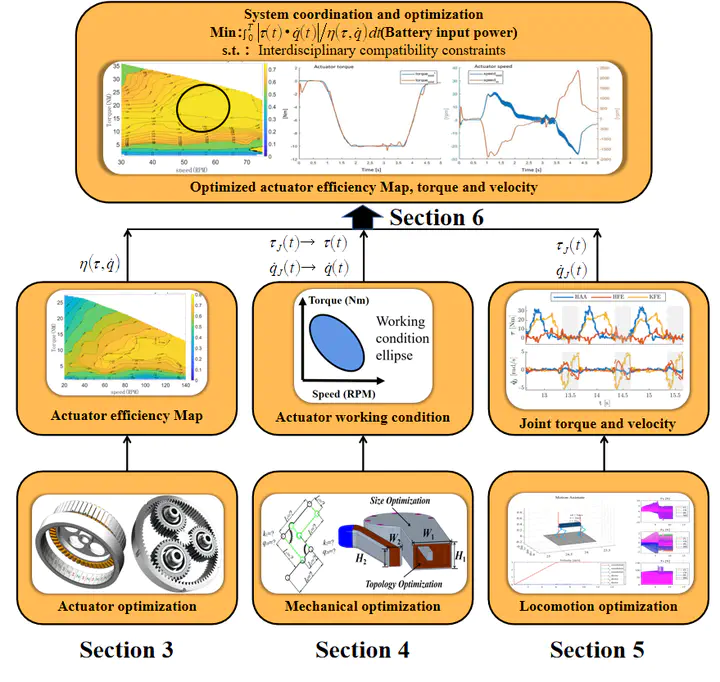
An energy-efficiency design optimization framework for legged robots
Date
Nov 6, 2022 8:30 PM — 10:30 PM
Event
Conference
Location
ERB 106
Sha Tin, Hong Kong, CHN 00852
The Chinese University of Hong Kong(CUHK) LeggedRobot Lab
A LeggedRobot Group from Prof. Yun-Hui Liu Lab
Our research interests include quadruped robot, bipedal robot, Reinforcement Learning, Legged-Wheel Robot , Multi-sensor fusion and Multidisciplinary optimization.