Quadruped robot walking like lizard with two point feet
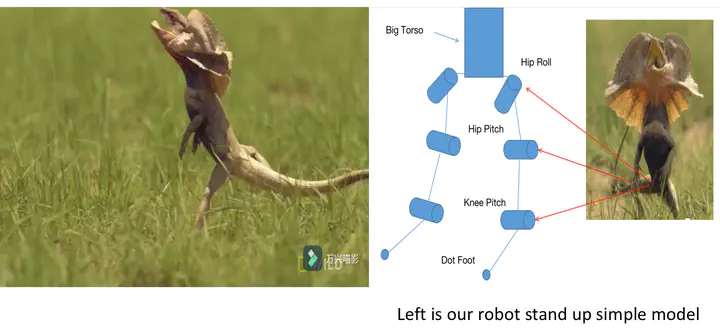 Photo by linzhu on HK
Photo by linzhu on HK
The aim of this research theme is to try to empower quadrupedal robot two point feet walking using existing gradient-based, reinforcement learning, meta-heuristic-based algorithms, etc. Currently, ongoing!
CUHK LeggedRobot Lab
A LeggedRobot Group from Prof. Yun-Hui Liu Lab
Our research interests include quadruped robot, bipedal robot, Reinforcement Learning, Legged-Wheel Robot , Multi-sensor fusion and Multidisciplinary optimization.