 Photo by linzhu on HK
Photo by linzhu on HK
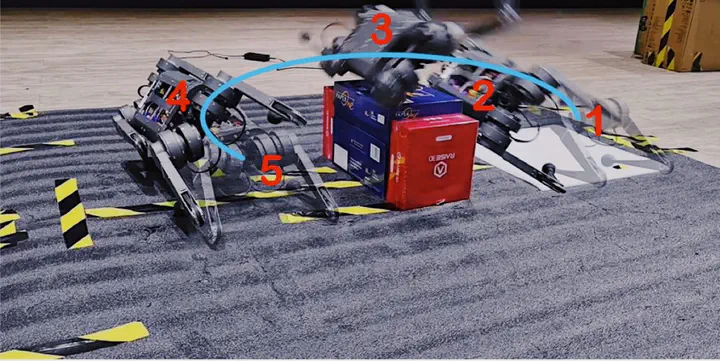
The aim of this research theme is to try to empower quadrupedal robot or bipedal robot jumping using existing gradient-based, reinforcement learning, meta-heuristic-based algorithms, etc. Currently, meta-heuristic-based online and offline jumping is implemented.
The Chinese University of Hong Kong(CUHK) LeggedRobot Lab
A LeggedRobot Group from Prof. Yun-Hui Liu Lab
Our research interests include quadruped robot, bipedal robot, Reinforcement Learning, Legged-Wheel Robot , Multi-sensor fusion and Multidisciplinary optimization.