CUHK Legged Robot Lab (CUHKLRL)
CUHK Legged Robot Lab (CUHKLRL)
Home
People
Publications
Posts
Talks
Projects
Join Us
Light
Dark
Automatic
2
Dynamic Locomotion through Robust Model Predictive Control
Robust MPC for biepdal and quadrupedal robot
Linzhu yue
,
Weipeng Xia
,
Bike Zhang
,
Siddharth H. Nair
,
Zhongyu Li
,
Zhitao Song
,
Hongbo Zhang
,
Koushil Sreenath
,
Yun-Hui Liu
Video
Online Omnidirectional Jumping Trajectory Planning for Quadrupedal Robots on Uneven Terrains
Online Omnidirectional Jumping Trajectory Planning
Linzhu yue
,
Zhitao Song
,
Jinghu Dong
,
Zhongyu Li
,
Hongbo Zhang
,
Lingwei Zhang
,
Xuanqi Zeng
,
Koushil Sreenath
,
Yunhui Liu
PDF
Cite
Video
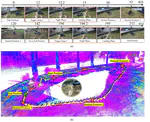
Traversability-Aware Legged Navigation by Learning from Real-World Visual Data
Traversability-Aware Legged Navigation by Learning
Hongbo Zhang
,
Zhongyu Li
,
Xuanqi Zeng
,
Laura Smith
,
Kyle Stachowicz
,
Dhruv Shah
,
Linzhu yue
,
Zhitao Song
,
Weipeng Xia
,
Sergey Levine
,
Koushil Sreenath
,
Yun-Hui Liu
PDF
Cite
Video
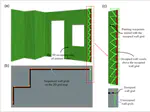
Building information modeling‐based 3D reconstruction and coverage planning enabled automatic painting of interior walls using a novel painting robot in construction
Painting Robot
Yang Zhou
,
Peng Li
,
Zefeng Ye
,
Linzhu yue
,
Linhai Gui
,
Jiang Xin
,
Xiang Li
,
Yunhui Liu
PDF
Cite
DOI
Cite
×